Accomplishments:
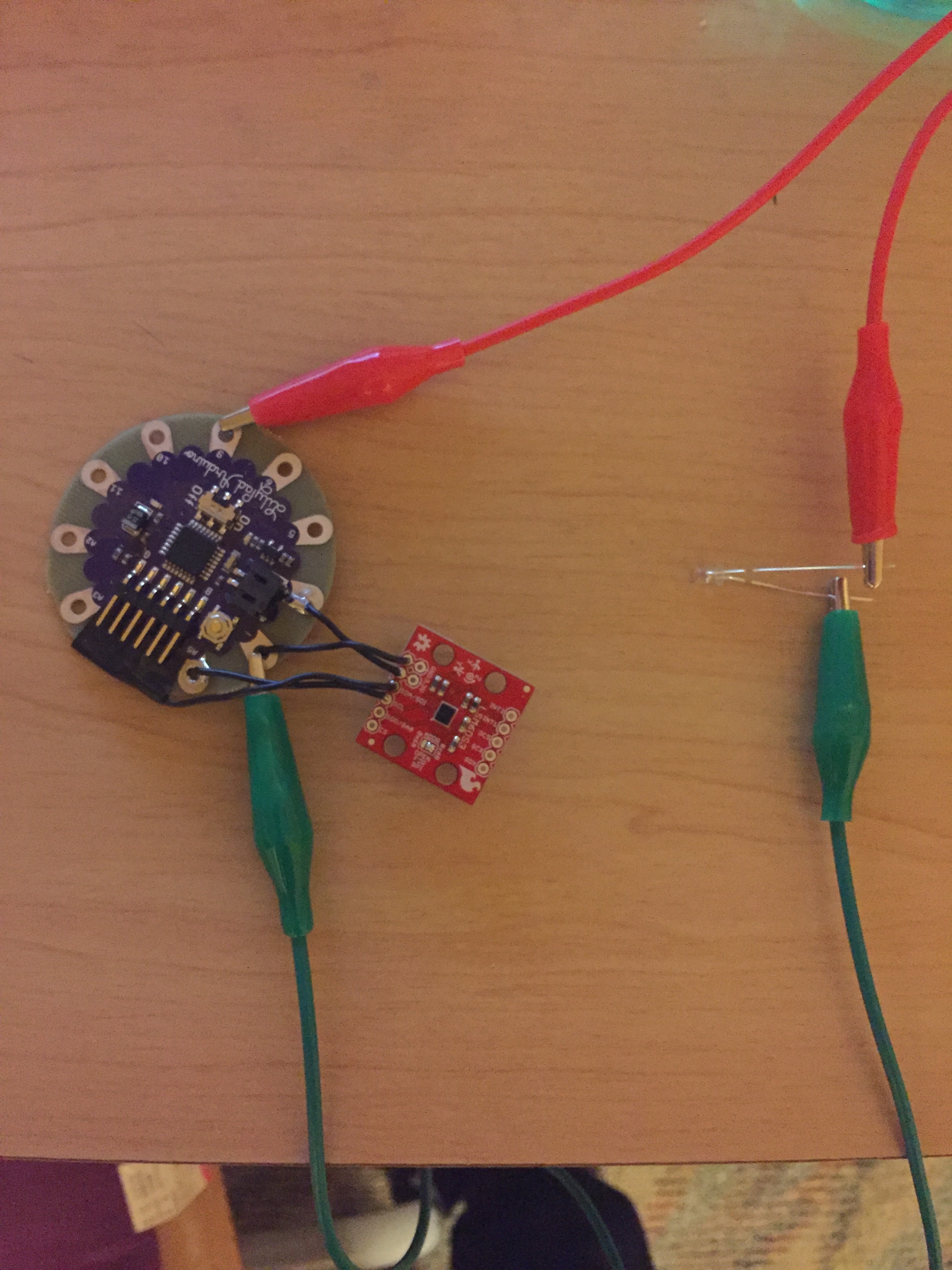
Both Alex and Kevin soldered the IMU to the LilyPad and ran the minimalistic example code to ensure the IMU was hooked up correctly and outputting reasonable values in the serial monitor. At first we were having trouble uploading code to the board but this problem was easily resolved by covering the soldered analog pin below the mini USB connection. We have been working on our code and have a solid basis. We are taking the magnitude of the x, y, and z direction in order to record average change in motion values. We configured the code to take the average of 12 magnitude values to reduce noise. We are currently getting pretty accurate values from the accelerometer. We began writing the code to control the lights. We modeled the hookup with alligator clips.
Problems Encountered:
So far we have been able to solve all problems we have run into. Our accelerometer readings are not as accurate as I would like them to be so we have a bit of troubleshooting to do in this area. We realized that gravity was affecting the readings pretty substantially. As of right now we do not need any help but I will let you know if this changes on Tuesday.
Plan for this week:
We would like to finish the code completely and model the light set up with alligator clips so that I can set all of the thresholds in the code to accurate values. We need to add a LED turn on code, LED fading code and LED blink code using if/else statements to specify certain magnitude values that will trigger these responses. After spring break I would like to have the microcontroller and accelerometer sewn into the outfit along with at least 2 strings of LEDs sewn in and hooked up to the microcontroller. Also just a heads up, I (Alex) will not be in class on Thursday.