
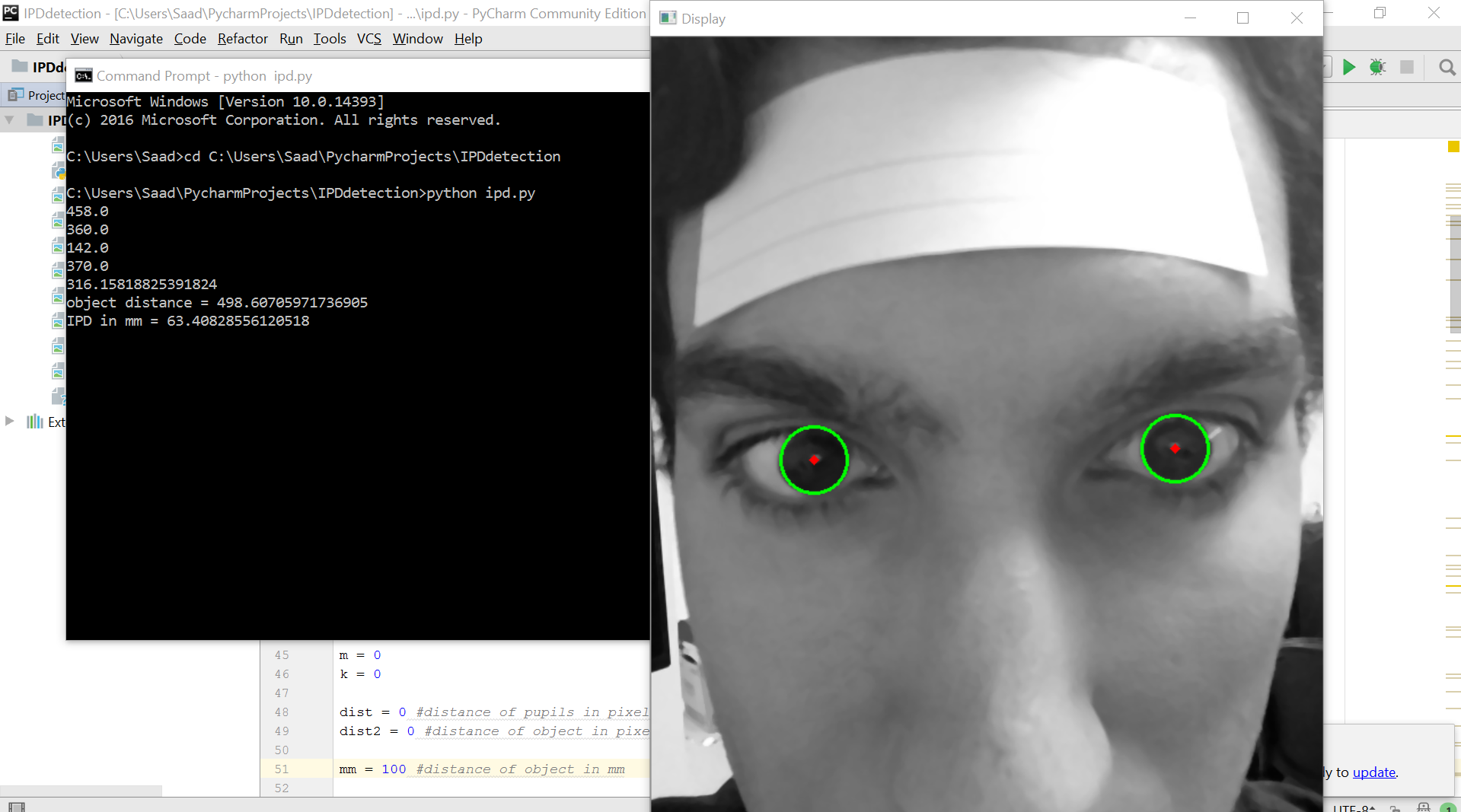
Here’s how the project turned out:
And the code for the project:
import cv2
import numpy as np
import argparse
import math
from scipy.spatial import distance
#ap = argparse.ArgumentParser()
#ap.add_argument("-i", "--image", required = True, help = "Path to the image")
#args = vars(ap.parse_args())
#img = cv2.imread(args["image"])
img = cv2.imread("test.jpg", 0)
img = cv2.medianBlur(img,5)
cimg = cv2.cvtColor(img,cv2.COLOR_GRAY2BGR)
cv2.namedWindow("Display", flags= cv2.WINDOW_AUTOSIZE)
circles = cv2.HoughCircles(img,cv2.HOUGH_GRADIENT,1,100,
param1=50,param2=25,minRadius=10,maxRadius=30)
circles = np.uint16(np.around(circles))
#coordinates of pupils
point1x = 0.0
point1y = 0.0
point2x = 0.0
point2y = 0.0
#coordinates of object on forehead
leftpointx = 0
leftpointy = 0
rightpointx = 0
rightpointy = 0
#coordinates of pupils in case hough circles doesn't work
leftpointx2 = 0
leftpointy2 = 0
rightpointx2 = 0
rightpointy2 = 0
objectexist = 0
m = 0
k = 0
dist = 0 #distance of pupils in pixels
dist2 = 0 #distance of object in pixels
mm = 100 #distance of object in mm
n = 1
for i in circles[0,:]:
# draw the outer circle
cv2.circle(cimg,(i[0],i[1]),i[2],(0,255,0),2)
# draw the center of the circle
cv2.circle(cimg,(i[0],i[1]),2,(0,0,255),3)
if n == 1:
n = 2
point1x = float(i[0])
point1y = float(i[1])
elif n==2 :
point2x = float(i[0])
point2y = float(i[1])
#print(" " + point1x + ", " + point1y + ", " + point2x + ", " + point2y)
print(point1x)
print(point1y)
print(point2x)
print(point2y)
dist = math.hypot(point2x - point1x, point2y - point1y) #ipd in pixels
#if dist < 10000:
print(dist)
def my_mouse_callback(event, x, y, flags, param):
global m
global k
global leftpointx
global leftpointy
global rightpointx
global rightpointy
global leftpointx2
global leftpointy2
global rightpointx2
global rightpointy2
global objectexist
global dist
global dist2
if event==cv2.EVENT_LBUTTONDBLCLK:
m = m+1
#print(x)
if m == 1:
leftpointx = x
leftpointy = y
elif m == 2:
rightpointx = x
rightpointy = y
dist2 = math.hypot(rightpointx - leftpointx, rightpointy - leftpointy)
print( "object distance = " + str(dist2))
if dist < 10000:
distanceInMM = dist * (mm / dist2) # ipd in mm
print( "IPD in mm = " + str(distanceInMM))
if dist > 10000:
if event==cv2.EVENT_RBUTTONDBLCLK: #used if hough circles doesn't work
k = k+1
if dist2 == 0:
dist2 == 500
#print(x)
if k == 1:
leftpointx2 = x
leftpointy2 = y
elif k == 2:
rightpointx2 = x
rightpointy2 = y
dist = math.hypot(rightpointx2 - leftpointx2, rightpointy2 - leftpointy2)
print("IPD in pixels = " + str(dist))
distanceInMM = dist * (mm / dist2) # ipd in mm
print( "IPD in mm = " + str(distanceInMM))
cv2.setMouseCallback("Display",my_mouse_callback,cimg)
while(1):
cv2.imshow("Display",cimg)
if dist2 == 0 and dist < 10000:
c = cv2.waitKey(0)
if c == 32: #spacebar
dist2 = 500
distanceInMM = dist * (mm / dist2) # ipd in mm
print("IPD in mm = " + str(distanceInMM))
if cv2.waitKey(15)%0x100==27:break # waiting for clicking escape key
cv2.destroyWindow("Display")
#cv2.imshow('detected circles',cimg)
#cv2.waitKey(0)
#cv2.destroyAllWindows()