
Last week, I focussed on fixing the Kinect and started obtaining Point Cloud Data. This week I have obtained a continuous PCD using the SCENECT software. The SCENECT software is fairly easy to use and complements for not having KinFu. It obtains data from the Kinect and forms a 3D PCD by registering the frames as we move the Kinect.
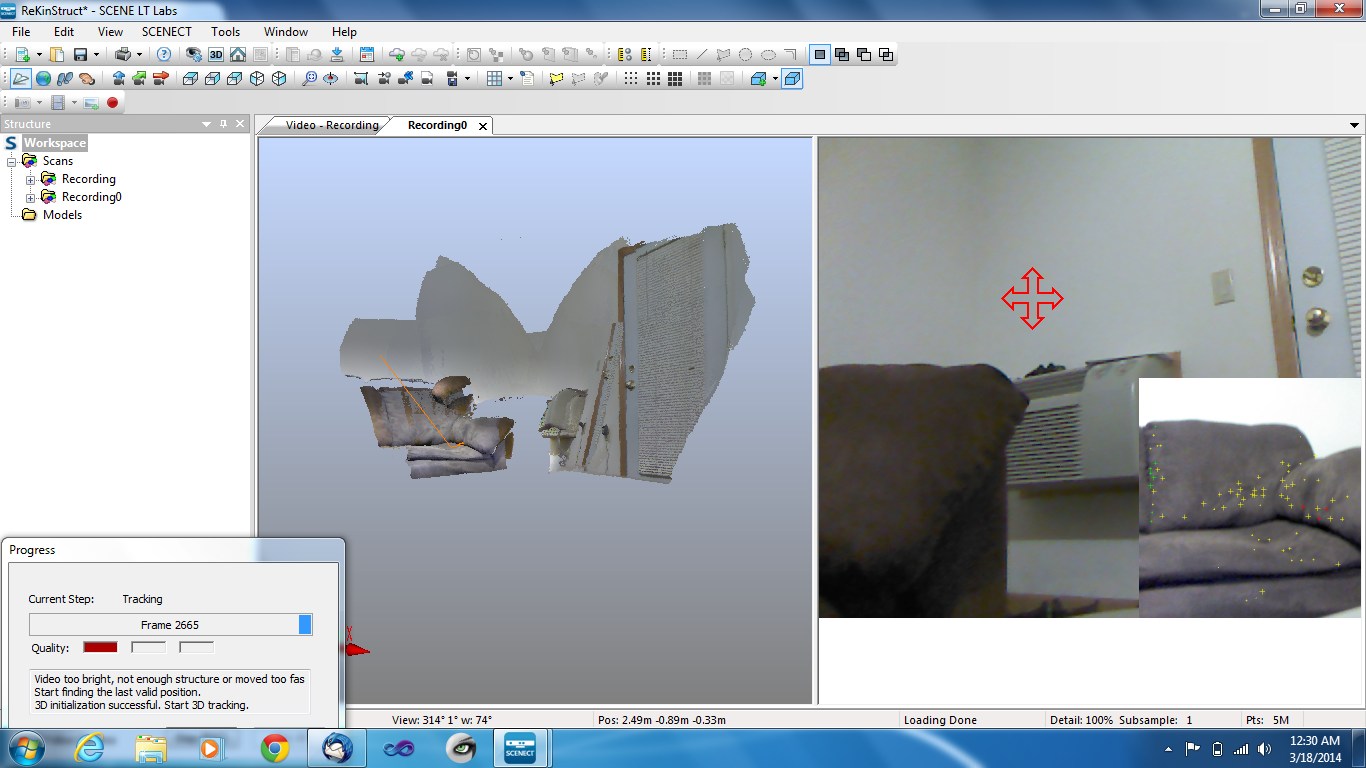
The window on the right shows the frame that is being currently read from the Kinect and the window on the left shows the registered PCD. The yellow and green points on the right show the registration checkpoints for the frames. In my opinion, it is fairly good for registration and colour values. However, scanning and registration take a bit of time. For example, as you can see from the small window on the extreme left, it took around 2600 frames to register this small point cloud data. I have not worked with KinFu so I do not have anything to compare against but all in all, I think it is a good GUI to obtain data. It also offers a lot of post-processing options which I will try to figure out this week.
Below is the final PCD obtained from the scanning. 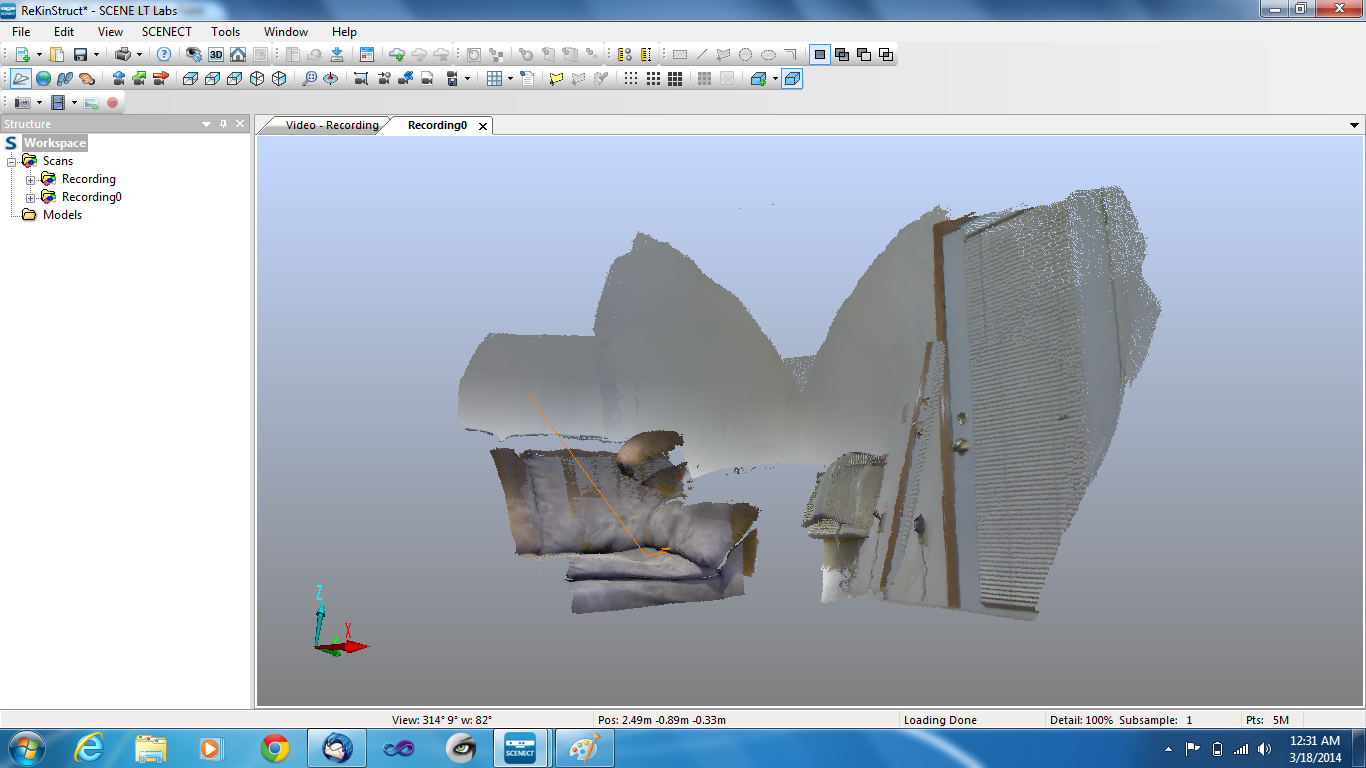
However, SCENECT does not readily allow us to export the scan points as a .pcd file. The easiest way to go around this is to save it as a .xyz file and write a program that reads every line containing XYZRGB values and write a .pcd. There are two ways to do this:
1. Based on the tutorial from http://pointclouds.org/documentation/tutorials/writing_pcd.php. For this method, you need to know the number of points in the cloud beforehand. This essentially means that you go throughout the .xyz file twice: first to know the number of points to create the cloud of the necessary size; second to read in the values from the .xyz file
2. The easier and the simpler solution is to just create a cloud pointer as
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud;and push_back the points as and when read from the file.
( I do not know why pointclouds.org has not written the tutorial based on the second method )
On a parallel note, I also tried playing around with the OpenNI grabber to obtain PCDs. The salient difference in using this method is that it saves a .pcd of the one frame that is being read from the Kinect at that instant of time. Thus, there is no possibility of registering frames and making a huge point cloud. For a start, I read the frame as
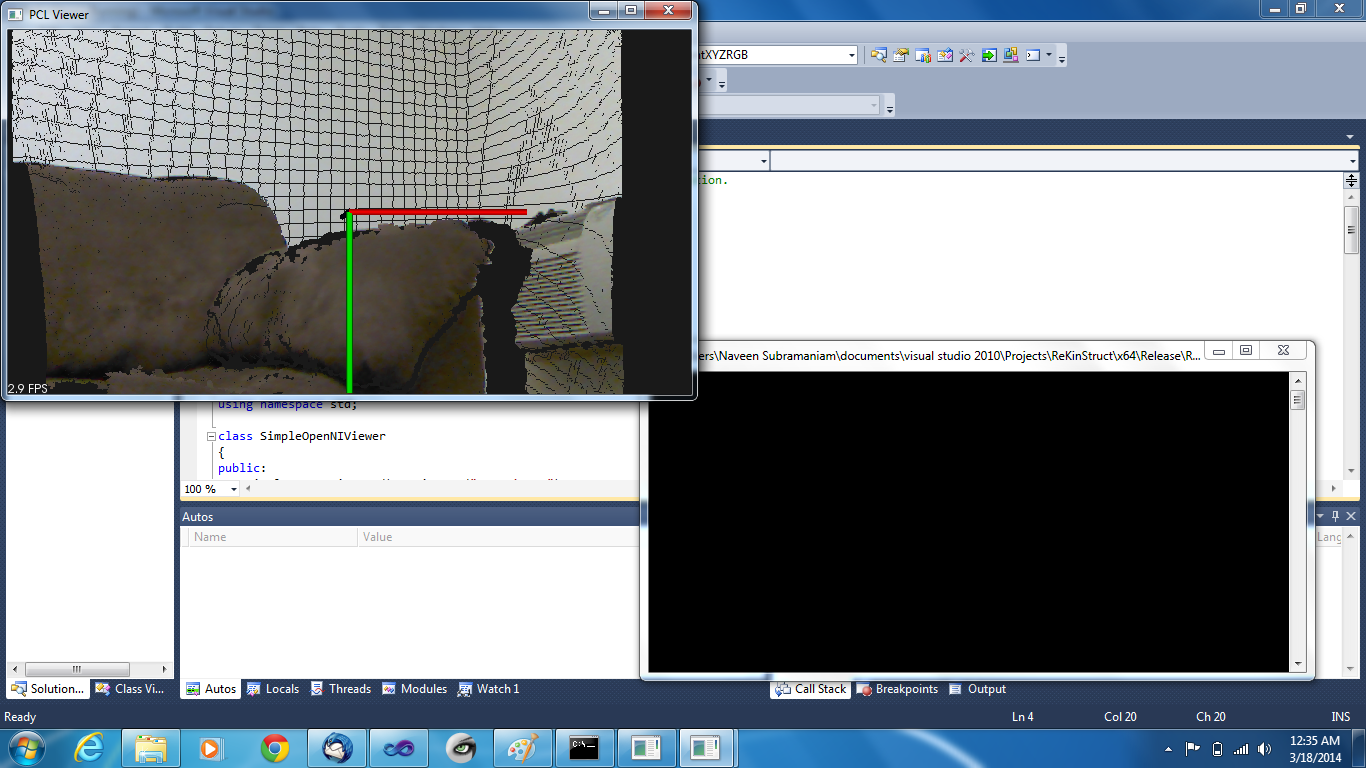 and the PCD file that was saved appears something like
and the PCD file that was saved appears something like
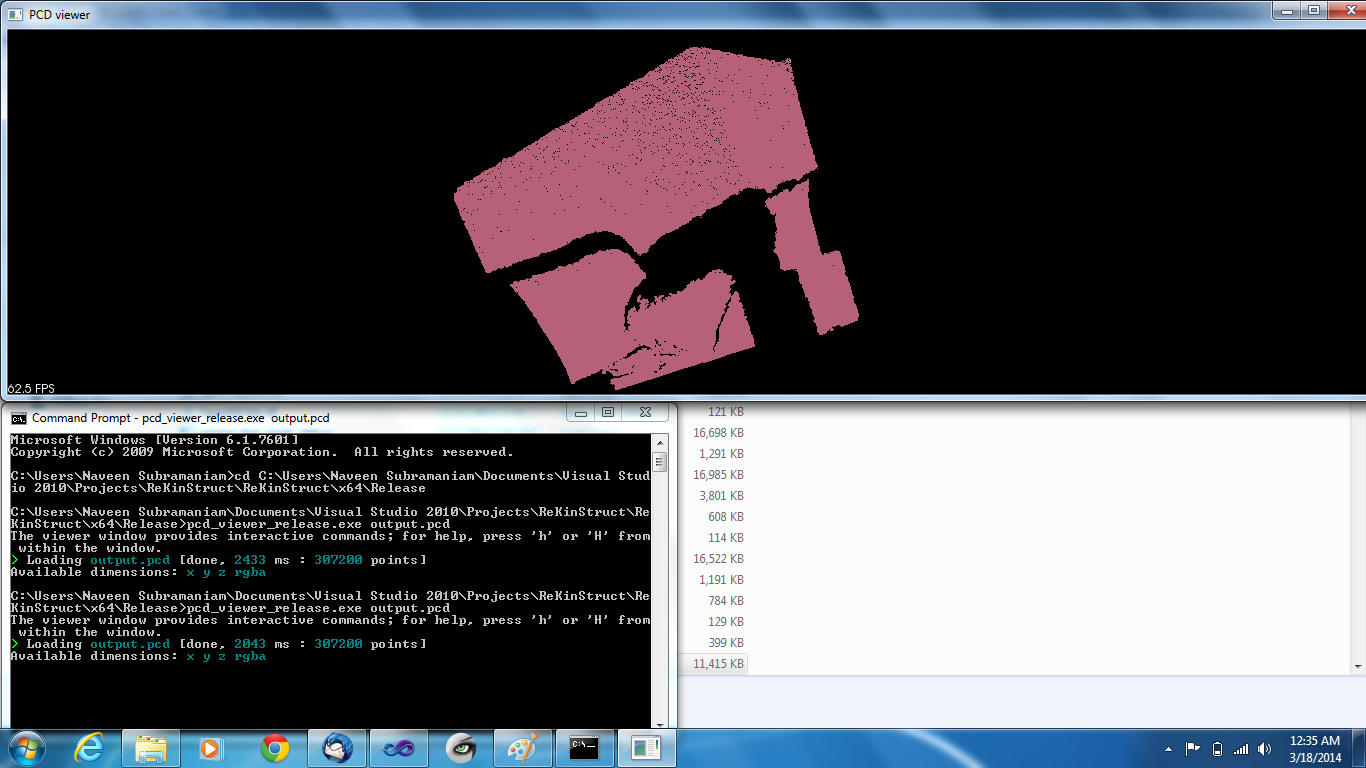
That is the couch and the air conditioner nearby saved as a point cloud and viewed using the pcd_viewer_release.exe given by PCL. Though this method of obtaining PCDs doesn’t have a potential advantage over the SCENECT, the OpenNI grabber PCDs can be used to obtain time varying PCD frames. That will be my goal for the upcoming week. Try to obtain time varying point clouds (like a candle melting) and switch through them. The dream would be to switch through ‘n’ number of point clouds fast enough that it will appear like a 3D movie.! Sounds cool, right?