
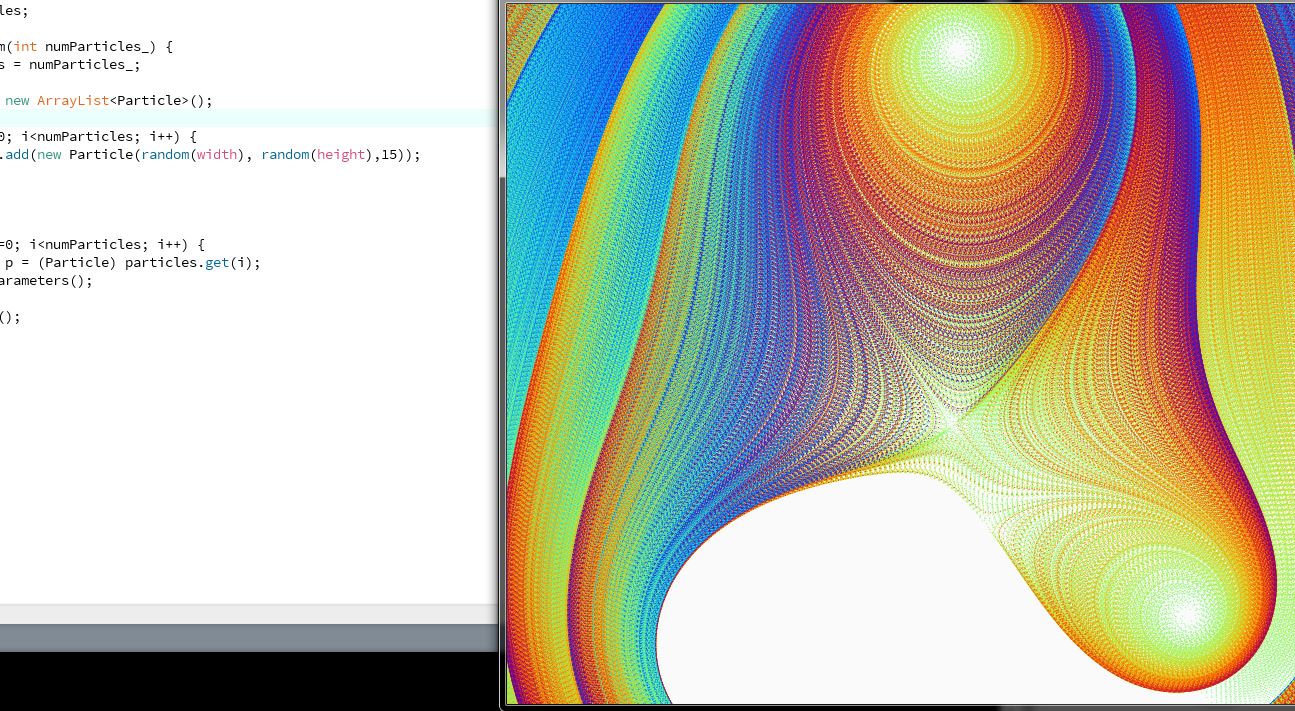
Final Composition
For my final composition, I really wanted to go all out. I was thinking of a way of shaping a terrain, like a generative landscape circumscribed by beautiful curves and colors. From my experience studying electromagnetism my junior year, I knew vector fields of attraction or repulsion can create beautiful compositions. So my goal was to simulate a pseudo vector field (this really isn’t exactly realistic) with 3 attractors, randomly positioned across the canvas. Toxiclibs is a great resource for simplifying the process of coding such a scenario because the its vector classes and verletphysics engine take out most of the manual setting up of forces and correspoding motion of the particles. You simply set up your grid of particles and attractors as arrays and the kinematics are automatically calculated.
Prof. Ponto has asked me to prepare a brief review of the semester by answering some questions.
1- What are your overall feelings on your project?
– I am very satisfied with what I accomplished this semester. This was my first time coding and each week I feel that the complexity of my compositions and the flow of writing code got a lot better. At the end of the semester, I started getting a bit sidetracked by my other academic responsibilities but I am very glad that I ended up with 14 different sketches, some of which could be used for the conceptualization of architectural form.
2- How well did your project meet your original project description and goals?
From a logistics point of view, according to my syllabus I should have ended up with 16 different sketches. I was only able to complete 14 compositions and 12 blog entries, though I am finishing up two additional ones before Monday. So that was an acceptable performance, in my opinion, but not stellar. I was not able to do Chapter 5 of the “Nature of Code” which would have introduced me to boids and flocking behaviors, which is really the real core of autonomous agent systems. With that said, I was able to get a lot of practice on particle systems.
3- What were the largest hurdles you encountered? How did you overcome these challenges?
Coding is difficult. It takes me a lot of time. I feel like I can code, but probably not for a living. I feel like I am not expedient enough. But there is something that really pushes me to want to continue doing this. I really want to prove that I can be part of the next generation of generative designers. I want to be able to use these simple algorithms in the conception of a building. When I look at the images that the code generates, I always find myself extracting the form and making it architecture in my mind. That intrigue of what it could be if I were to use the curves or point clouds as the basis of building plan, or landscaping or actual 3D forms, was motivating enough to keep pushing harder.
4- If you had more time, what would you do next?
I definitely want there to be a next time, next semester. I have set my mind on coding boids and meshes from their trajectories and Processing, with the addition of another library, has the capability of creating isosurfaces from point data that can then be exported to a 3D modeling package for polishing and sculpting. I want to develop a workflow between my code and the software that I already use like Rhino, 3DS MAX. I want to continue the study of agent based systems as a another of form exploration.
Thank you so much.







{kind=link}