
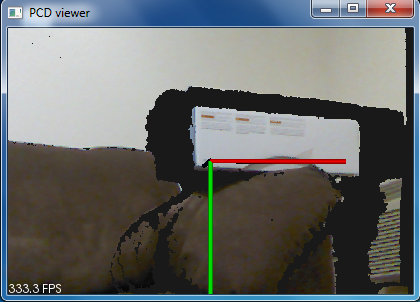
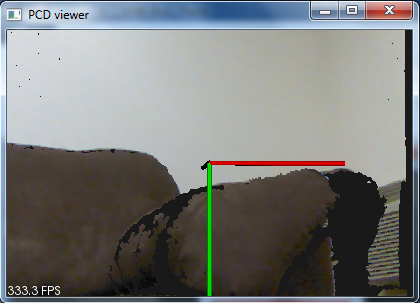
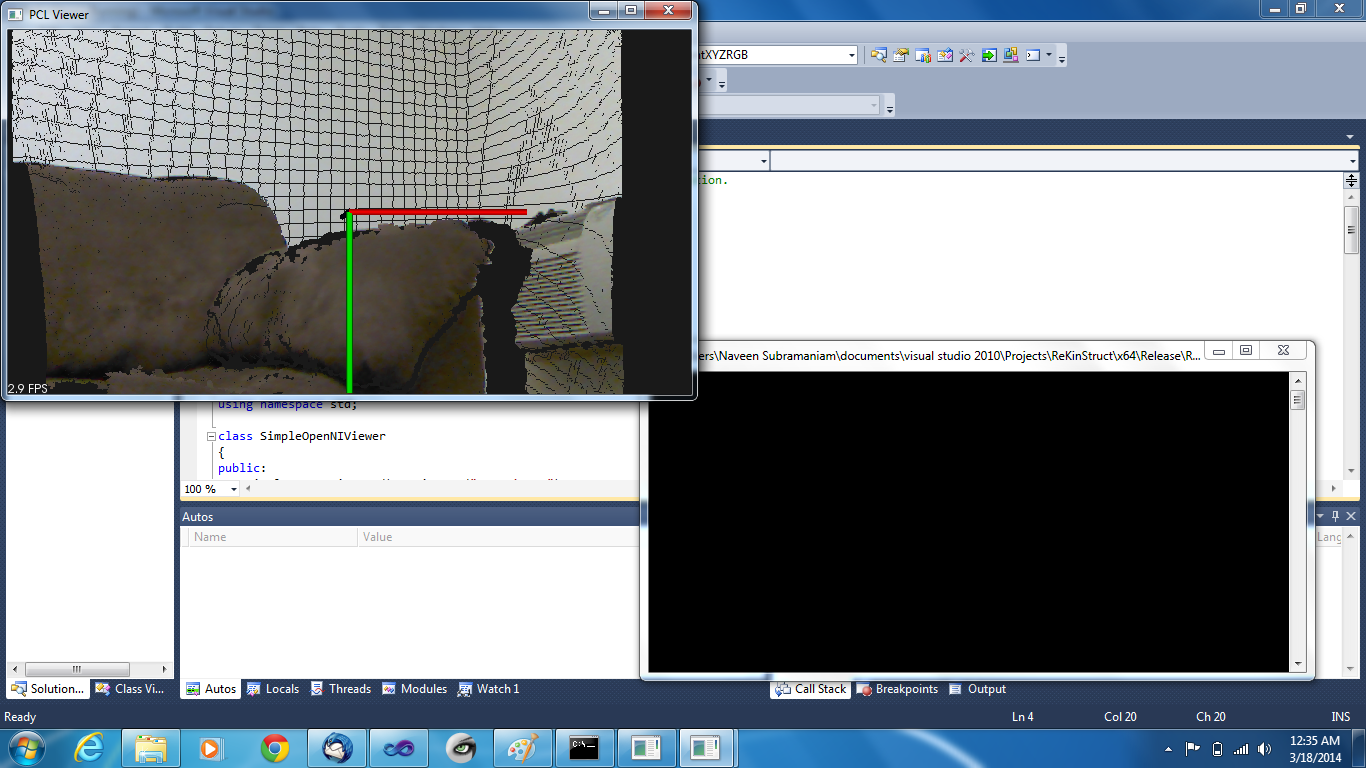
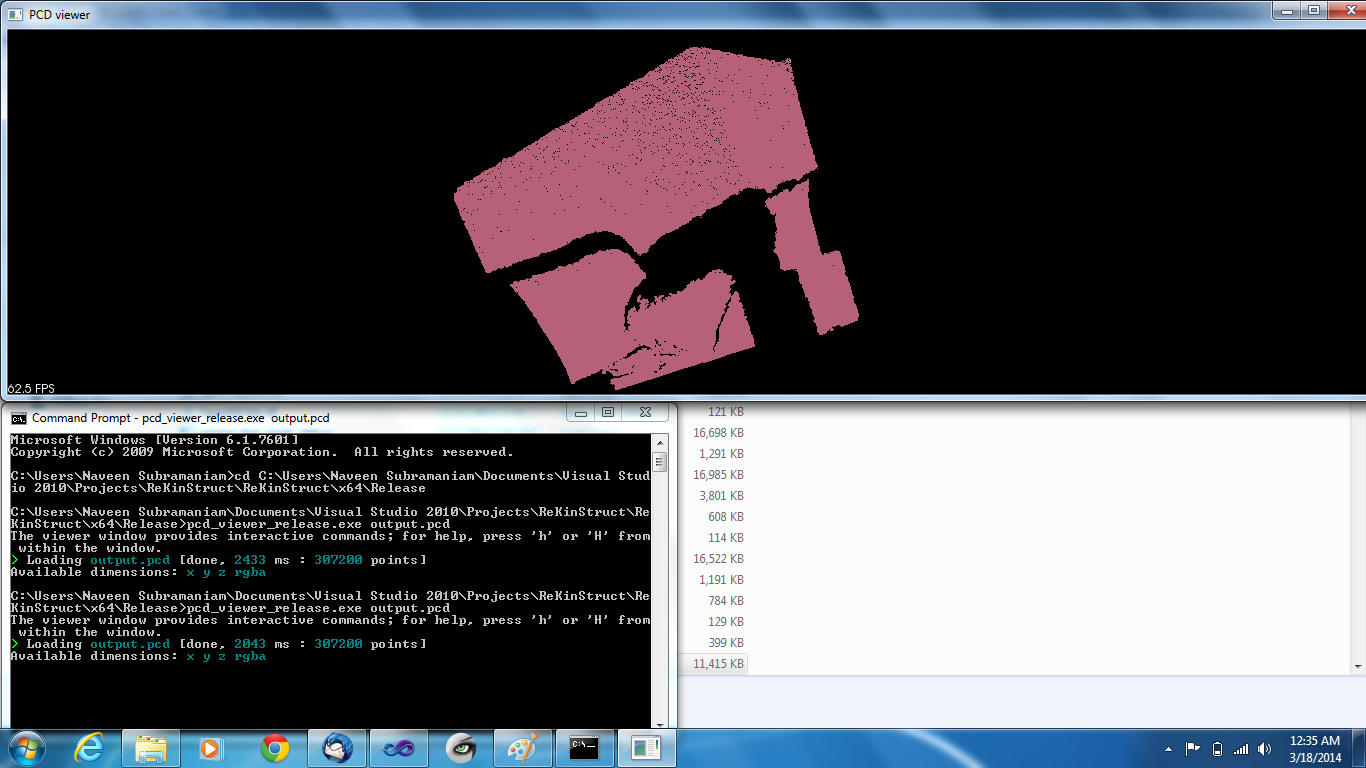
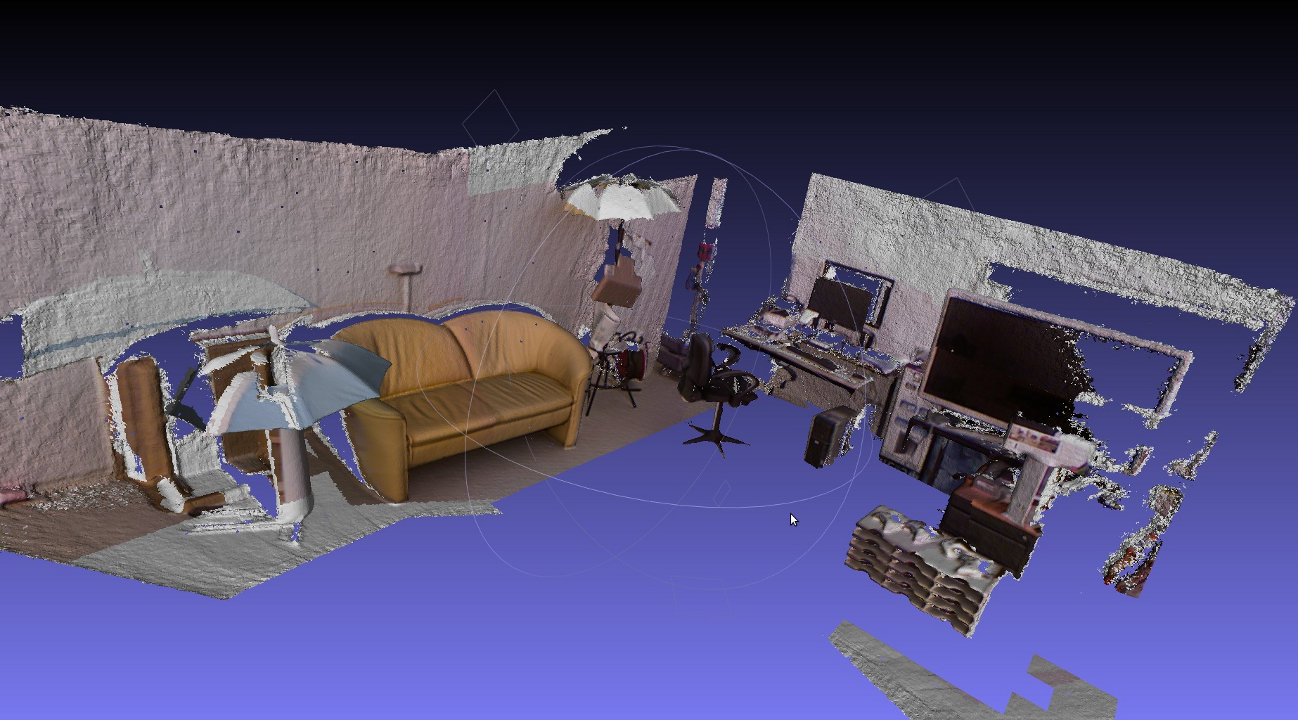
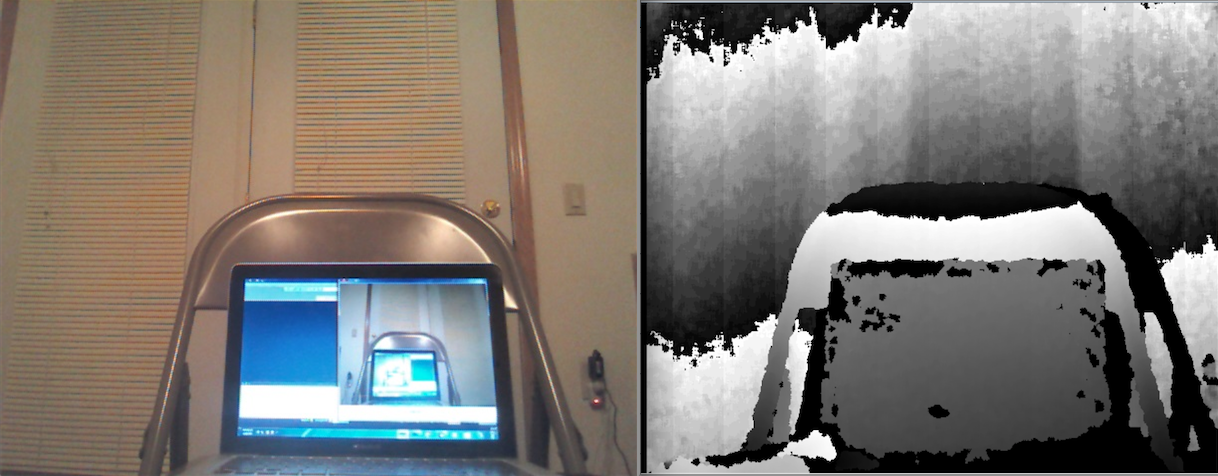
This week, I tried to switch visualising between two PCD files to check if it was feasible in run-time and to know how long it takes for the process. The following were the two PCD file visualisations I was trying to switch between: couch with the box and without the box.
I tried doing this by two methods.
Method1) Load both the PCD files initially into cloud pointers. Display one and switch to another on the click of a button.
Method2) Load one PCD file and display it. On the click of a button, clear the current pointer, load the other PCD file and display it.
I am attaching videos to show how fast the process was.
Simultaneous Load: http://youtu.be/tFJUoOFaGcY
Sequential Load: http://youtu.be/77-9w1rnUyA
I have loaded the Point Cloud Data without the colours (PointXYZ as opposed to PointXYZRGBA) on purpose to get a feel of the point cloud. Also please note that the time taken to switch between the point clouds is the time from when I click ‘s’ to the time it prints ‘Changing point clouds’ on the console. ‘Changing’ would have made more sense if it was ‘changed’. My apologies.
The main observations were:
1) Switching between PCD files that have already been loaded into memory was faster than loading it from the disk.
2) Loading more PCD files into memory will require a lot of RAM space. There was a mild increase in memory used in the Task Manager during Method1 than Method2 window because only two files were loaded now. I suppose there might be a scenario where we would need to switch between ten or more PCD files that might end up using a large chunk of the main memory.
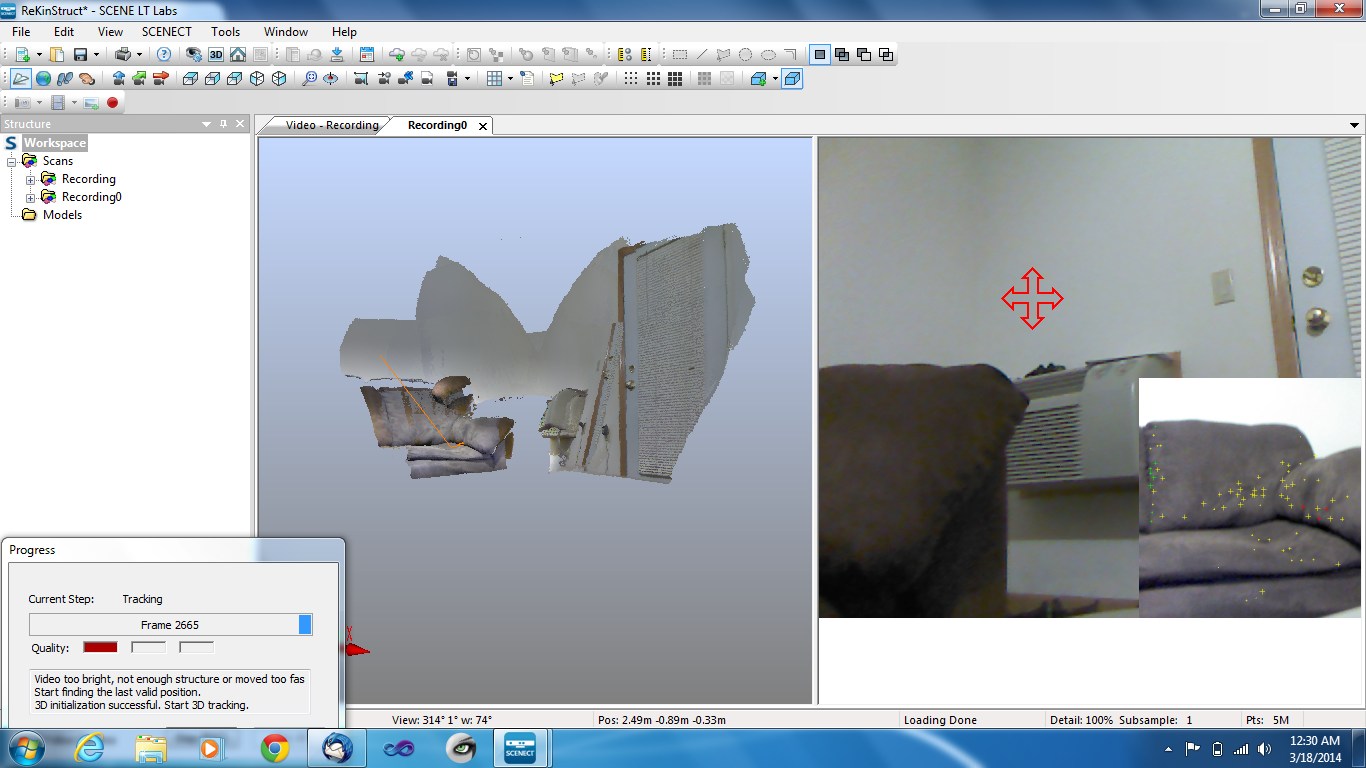
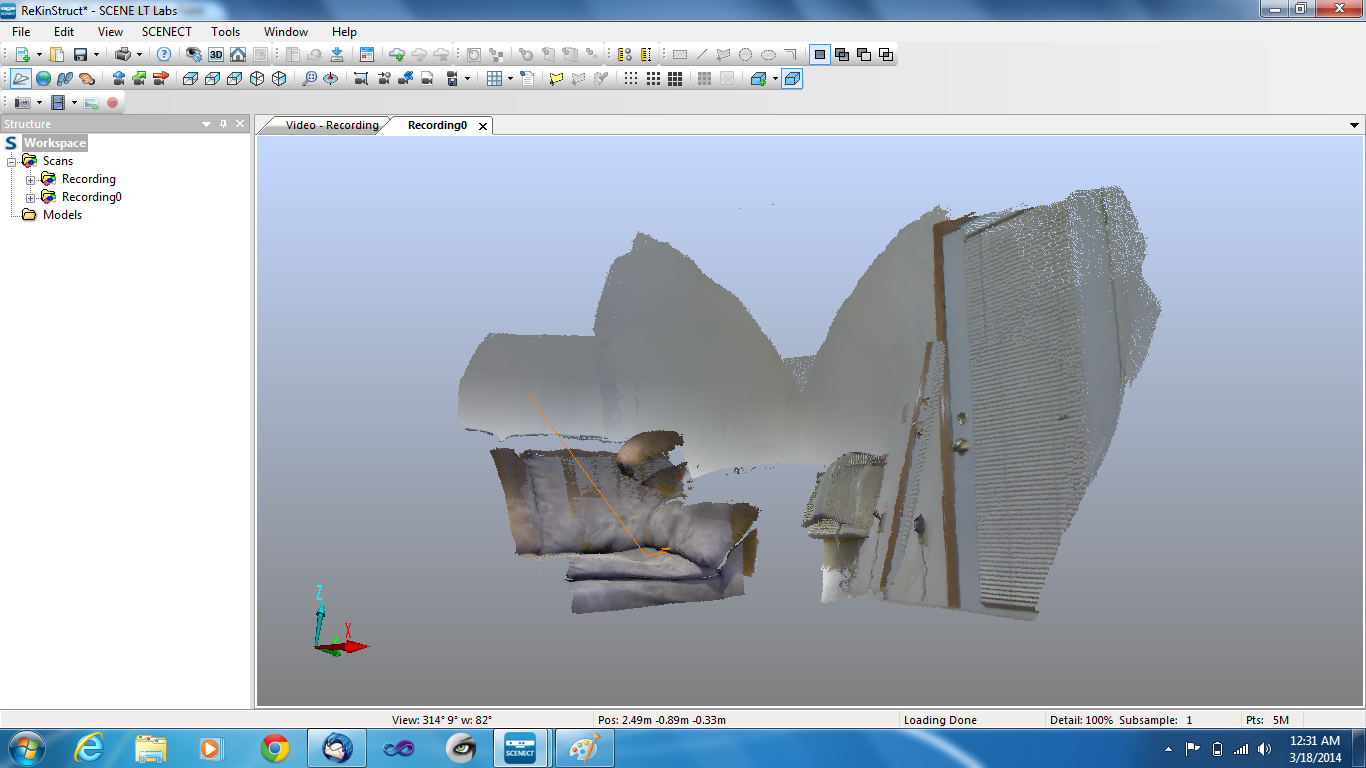
The moire pattern on the wall that was far from Kinect was due to poor resolution of the Kinect with respect to distance. The coloured pictures on the top show the same PCD files without the Moire pattern as the display windows are small and hence the reduced resolution.
This week I am going to try getting more PCD files from an interesting scenario and try switching between them automatically. I hope the video looks interesting. Will keep you posted.!
Note: An interesting find was that the pcd_viewer_release.exe always loaded my PCD files in a rotated axis. I had to almost rotate the point of view by 180 degrees on the Z-axis to view the data. However, the pcd visualiser class loads the data as how the PCD was recorded ( in our case, the snapshot point cloud data). In cases where we need to rotate the Point Cloud Data while opening, the pcl::transformPointCloud() could be of use.

{kind=link}